
In our recent Nature paper, we outlined how Ace, our autonomous table tennis robot, could compete with and beat elite players in matches that took place in April of 2025, but we were unable to outplay professional players. That result proved a real-world AI system could rally and win against high-level human opponents.
In December 2025 we won our first game against a professional player but we wanted to know if we could consistently beat ranked professionals and where Ace might be ranked in high level play.
Between February and April 2026 we won matches against seven ranked professionals under official competition rules. That run included wins over Miyuu Kihara, currently World No. 26 in women's singles and the highest-ranked player Ace has beaten to date, and two-time Olympic silver medalist Miu Hirano, who afterward asked simply: "It's really strong. Is there really anyone who can beat this?"
This post documents how we got there.
On a Mission to Become a Professional
We made it our goal to record the first victory of an autonomous real-world system over a professionally ranked human table tennis player by the time the original results were made public in April 2026, one year from the tournament documented in our manuscript.
We can now reveal that this work was a success and Ace is capable of consistently outperforming professional players under official competition rules. Since the first recorded win over a professional (see here), Ace has won several matches against a variety of professional players with either current or recent world rankings. In this blog post we will report the results of these matches and provide sample videos for you to enjoy. We will also briefly discuss some of the improvements that were made to Ace after submitting the Nature article in order to achieve this historic milestone.
Who Were Ace’s Opponents?
During the months of February, March and April 2026, Ace had the opportunity to face a variety of female and male professional table tennis players. All players had a current or recent professional ranking in table tennis and were playing against Ace for the first time. Below you can find a brief description of each of the opponents in order to contextualize their table tennis ability:








What Were the Results?
As in the original Nature publication, all matches complied with official competition rules and were officiated by the following umpires licensed by the Japanese Table Tennis Association (JTTA): Yuko Sakagishi, Michiko Yamaguchi, Miho Seki, Sachiko Maeda. In the table below you can find the full results for all matches played against each opponent.
Ace won a match against all but one opponent and often won the majority of matches against each opponent. We believe this represents a significant leap in Ace’s performance compared to what was reported in the paper and is, to the best of our knowledge, the first demonstration of an autonomous robotic system beating professional level human opponents in an adversarial sport under official rules.
|
Ace vs. Professional Human Players |
|||||||||
|
Player |
Nagao* |
Shiomi* |
Ono* |
Shiomi* |
Okano* |
Kihara |
Ryuzaki |
Igarashi |
Hirano |
|
Gender |
F |
F |
M |
F |
M |
F |
M |
M |
F |
|
Best Senior World Ranking |
#195 |
#32 |
#296 |
#32 |
#179 |
#13 |
#99 |
#211 |
#5 |
|
Date (2026) |
Feb 17 |
Feb 26 |
March 4 |
March 18 |
March 18 |
March 25 |
March 25 |
March 25 |
April 21 |
|
Best of Three Results |
11-4 11-7 11-9 11-8 11-5 11-8 |
11-6 11-4 11-9 10-11 7-11 11-7 11-8 11-5 9-11 11-0 |
9-11 7-11 7-11 5-11 6-11 5-11 |
11-10 11-7 11-3 11-3 |
11-5 11-5 11-0 11-3 |
11-1 11-3 11-6 11-2 11-6 6-11 11-5 |
11-3 11-2 9-11 7-11 11-5 7-11 9-11 |
11-8 5-11 10-11 11-10 11-5 |
11-6 11-3 11-3 11-7 |
|
Ace Win Rate |
100% |
75% |
0% |
100% |
100% |
100% |
33.3% |
50% |
100% |
|
* These matches complied with official competition rules but were internal assessments. As a result there were no external umpires present. |
|||||||||
To appreciate the standard of table tennis Ace was able to achieve, you can view video highlights of a game against each opponent below:
Hirano:
Kihara:
Igarashi:
Ryuzaki:
Okano:
Ono:
Shiomi:
Nagao:
Of particular interest was how the players felt when competing against Ace. As Hirano was the player with the highest historical world ranking, we asked her to describe the experience of playing Ace for the first time. Below we include some of her initial impressions.
On the competitive ranking of Ace:
“I think this robot has the potential to rank in the top ten among women. Among men, it’s still around 50th place. In a steady rally, the robot doesn’t make any mistakes at all. However, if the opponent is a male player—especially one with a better serve or more power—I feel like they could break through the robot’s defense. Against female players who can’t do that, the robot’s consistency is truly impressive, so I think it could make it into the top ten for women.”
On the strengths of Ace:
“There were aspects of the robot’s playing style that were helpful to learn from. Whether I put spin on the rally or hit it hard, it responded to both, which made it very difficult to play against. Also, its movements were incredibly fast; whether I went to the side or the middle, it felt like it was already waiting there. From a player’s perspective, if the opponent stops and hits the ball, it’s impossible to predict where the ball will go. There aren't many strong players who hit while moving; the stronger the player, the less busy they look. Even if they're controlling well inside, you can't see that they're working hard on the outside. This robot is exactly like that—it doesn't hit while moving. It moves ahead quickly, stops, and then hits, so it's hard for me to predict where the ball will go.”
On the utility of Ace for human players:
“Until now, table tennis machines have been on a completely different level from human players, so I’d never seen adult players use them, but at this level, it’s truly usable for practice. It can even be used by top-level players. If this robot were installed at the training facilities of top players, I think there would probably be players who’d want to use it for practice.”
On facing a robot for the first time:
“When playing against a human, it’s easy to spot weaknesses. Because people have emotions and psychology, I tend to think things like, ‘If I serve here, they’ll definitely be waiting there, so if I serve a long serve next, they’ll probably be waiting up front and react this way.’
But with a robot, I can’t engage in that kind of mind game. Robots have no emotions. When I'm ahead, I know the opponent is discouraged, so if I attack more, it might break their spirit even further. Conversely, when I'm behind, I know the opponent is focused on winning, so if I play my usual game, they might get flustered and make mistakes because they want to beat me. With humans, there's that kind of psychological back-and-forth, but against a robot, there's none of that. I have no idea what it's thinking, so even if it makes a mistake, it just resets. That made it incredibly difficult for me.”
What Was Needed to Reach a Professional-Level?
Thanks to the flexibility of learning-based systems, which are the foundation of Ace, we could improve the system mostly through retraining rather than redesigning. This allowed us to quickly iterate and scale our approach to produce large performance gains over those reported in the original Nature publication.
Below we will briefly discuss some of the main improvements that were made in terms of control, simulation, robotic hardware and perception, in order to achieve wins against professional table tennis players.
Control: Ace uses two separate approaches for learning how to control the robot during the serve and rally phases of the game respectively. For the serves in the original Nature publication, Ace used a Genetic Algorithm (GA) to search a large array of serve motions in order to find ones with competitive characteristics such as high spin and velocity. To beat professional-level opponents this search process was replaced with Bayesian Optimization to improve search efficiency. This approach learns a probabilistic model of what makes a competitive serve and uses evolutionary search to decide which new serves to sample for updating the model. The sampling process prioritized sampling serves that were predicted to be competitive by the model and that were highly novel given the data collected so far.
When a new set of competitive serves have been found in simulation, they then have to be tested in the real world for transferability. In the original Nature publication, the same toss-up trajectory was used in simulation to find the set of serves to be tested in the real-world. However, for the new matches against professionals, a distribution of toss-up trajectories was used in simulation in order to find serves robust to a variety of toss-up motions. This greatly reduced the number of competitive serves that had to be removed due to failure in the real world, thereby maintaining a high serve variety in matches. To increase this variety even more, all serves were also mirrored such that Ace could serve from both the left and right side of the court.
For the rally phase of the game, Ace uses Deep Reinforcement Learning (Deep RL) to produce a neural network policy that can return the incoming ball with a variety of different skills. Recent advances in Deep RL have proposed methods for vastly increasing the size of the neural networks used in Deep RL algorithms. This allows Deep RL to benefit from the performance gains of scaling up network sizes, as shown in other domains such as supervised learning. By using such methods, we could increase the width of the hidden layers of both the policy and critic networks used in Ace. The number of weights in the policy and critic increased by a factor of ~2x and ~8x for a total of ~4.5M and ~51.5M weights respectively. This substantially improved the amount of reward achieved by the policy during training.
In addition to using a larger network, we were able to use a single policy network for all matches. This is in strong contrast to the original Nature publication where a bank of different networks was sampled to achieve enough variety in the skills that could be executed. This single policy network could perform 9 distinct skills (3 types of aiming ( left, middle, right) combined with 3 types of spin (back, free, top)), which were given as input to different layers of the network during training. These skills could then be sampled during matches to induce variety in Ace’s gameplay and reduce the predictability of the system while still using a single policy network.
Aside from the network architecture, the distribution of shots that the network was trained on was also updated to include shots from the Nature publication matches as well as from other internal assessments against professional players. This demonstrates the iterative nature of the problem faced by Ace; it must progressively play stronger players in the real world in order to collect experience about how they play. As the distribution of shots that Ace was trained on progressively reached professional-level, the amount of time it had to react also decreased. To deal with this issue we incorporated a new reward term during training that encouraged the policy to anticipate the flight of the ball and move to a pre-emptive hitting position. This reward was a function of the dexterity of the robot at hitting time, and was scaled by the change in time (directly proportional) and robot base position (inversely proportional) between the ball bouncing and being hit. This new reward term therefore incentivised the robot to anticipate the trajectory of the ball and move toward the eventual hit location, while allowing for enough time post-bounce to hit the ball with maximum dexterity.
Simulation: A crucial component of our simulation environment for training Ace is the physics models that describe the flight of the ball and its interaction with both the table and racket. In order to improve the transferability of Ace from simulation to the real world, all three physics models (aerodynamics, table contact, and racket contact) received updates to improve their ability to model real-world outcomes. These updates were made possible by the increased amount of data collected in a highly competitive setting since the original Nature matches. The improvements affected both the analytical models and the machine learning models that predict corrections to the output of the aforementioned analytical models. The need for improvement on both fronts demonstrates the complementary nature of physics-based modelling and machine-learning approaches for accurately capturing real world phenomena.
Robotic Hardware: As mentioned in the original Nature publication, topology optimization was used to reduce the mass of the robot links without compromising on stiffness. To beat professional players, this process was extended to the base components of the robot, resulting in two additional topology optimized parts and a further weight reduction of over 4 kg. Furthermore, the motors for the first and second joints of the robot were upgraded to be more powerful. These hardware changes increased the torque margin of each motor, which enabled significant acceleration improvements for the second joint. This allowed Ace to play more aggressive shots and in particular generate more spin in the real world.
Perception: While much of the perception system remained the same as the original Nature publication, the latency of the ball detection was improved from approximately 10ms to 8.5ms. This provides Ace with an improved reaction time and also allows it to act based on more recent ball observations. These additional benefits are particularly important due to the very fast-paced nature of professional level table tennis.
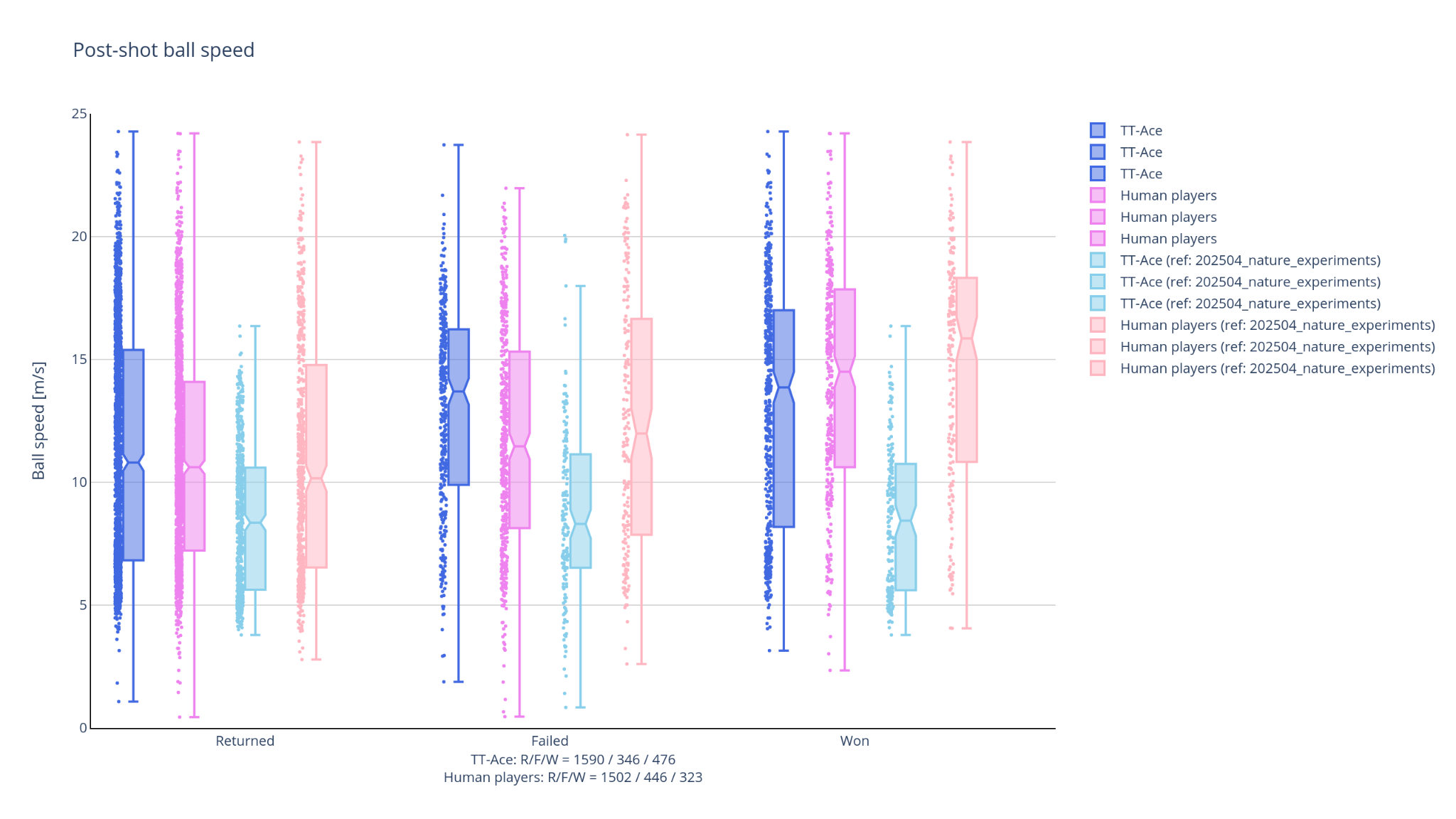
As a result of these improvements, Ace is now able to move with greater speed, react faster, hit the ball back harder and with more spin, return more consistently, serve more competitively and ultimately win matches at a professionally ranked level.
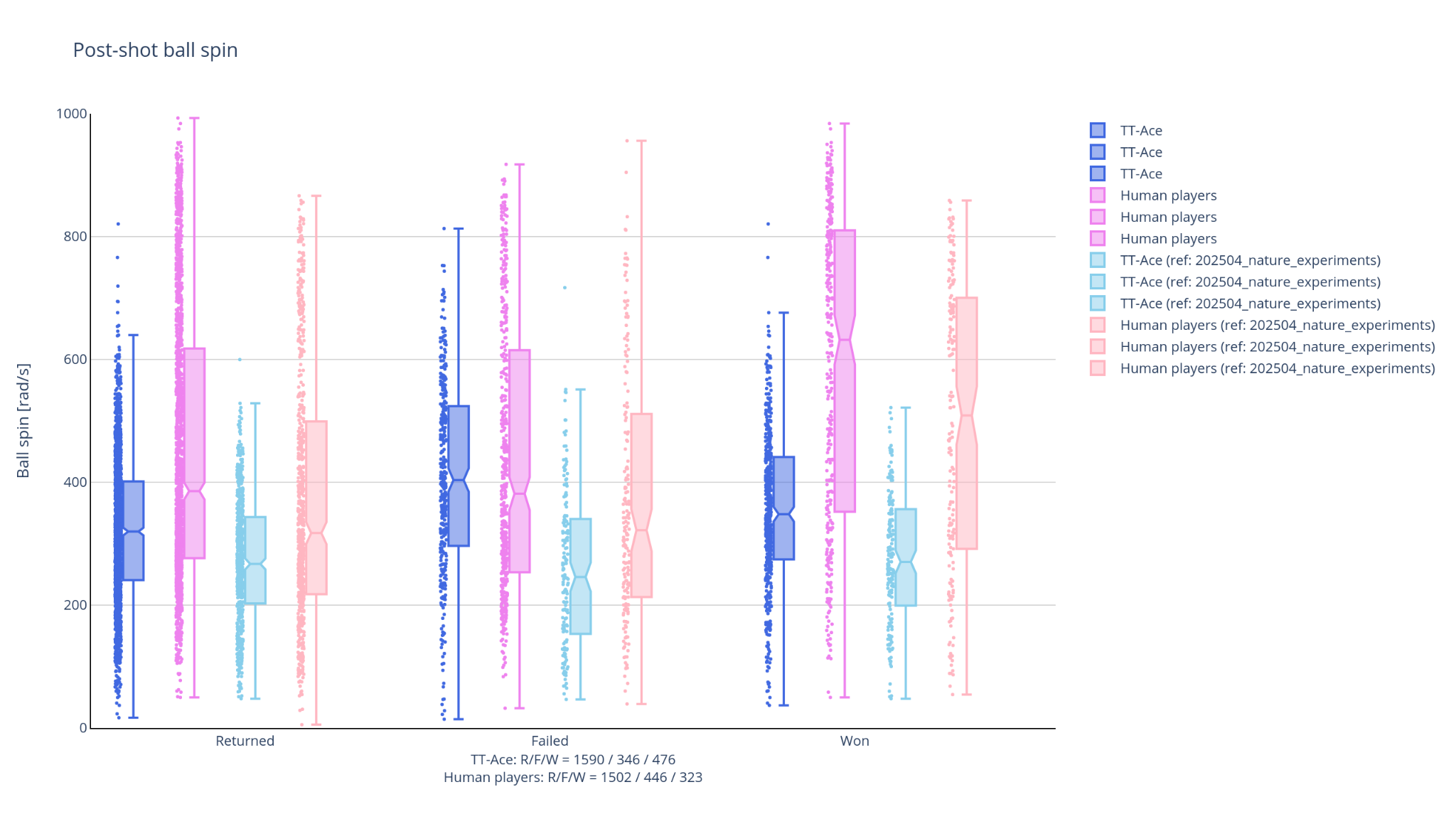
To illustrate the overall improvement in Ace’s capabilities, the figure below shows the ball speed and spin achieved by Ace and its human opponents for the professional matches reported here and the matches in the original Nature publication: From this figure we can see several key differences between the original Nature matches and the recent ones against professional players. When comparing the performance of Ace to itself, we can see that Ace is now capable of producing shots with higher speed and spin. Compared to the new set of professional players, Ace is able to generate similar shot velocities but cannot replicate the extremely high spin values. Interestingly, when comparing the human players between the two sets of matches we can see that the new set of professional players generate similar shot speeds but are able to generate substantially more spin. If spin generation is indeed a hallmark of more competitive human play, then further increasing Ace’s ability to generate spin could see it rise even further up the professional ladder.
Acknowledgements
The Sony AI team behind Ace would like to extend their thanks to the professional players who volunteered their time to compete against our system. We enjoyed having the opportunity to test Ace to the limit and experience the player reactions as they played a competitive robotic system for the first time. We would also like to thank the official umpires licensed by the Japanese Table Tennis Association (JTTA)—Yuko Sakagishi, Michiko Yamaguchi, Miho Seki, and Sachiko Maeda—who ensured all rules were followed and each point was scored fairly.


